|
Yizhou Chen
I am currently a Ph.D. candidate in robotics at the University of Michigan.
I am a member of ROAHM Lab supervised by Prof. Ram Vasudevan.
My current research interests include the perception, modeling, and planning of deformable objects.
My dream demo is to make wireharness assembly fully autonomous.
|
|
Research Projects |
|
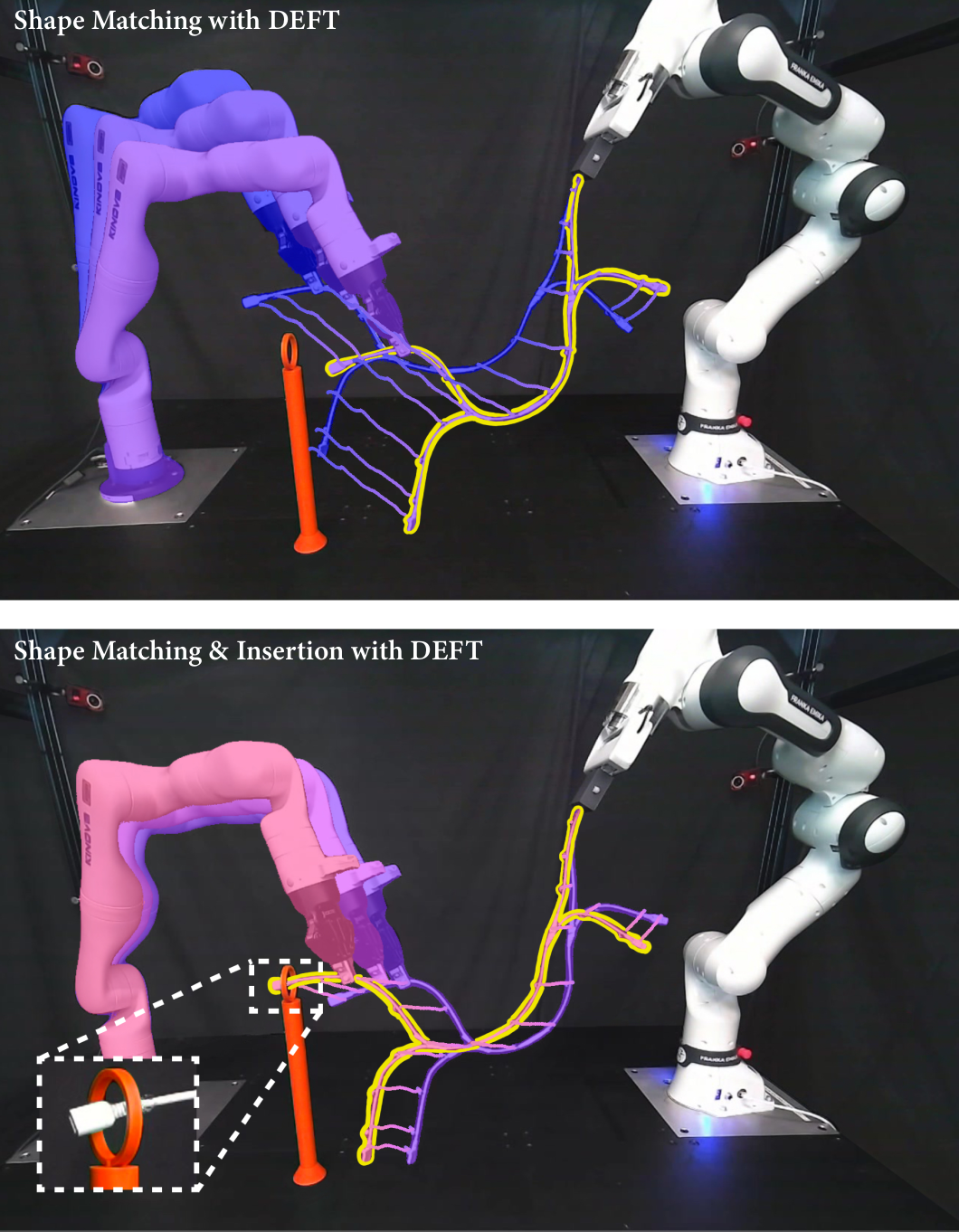
DEFT: Differentiable Branched Discrete Elastic Rods for Modeling Furcated DLOs in Real-Time
Yizhou Chen, Xiaoyue Wu, Yeheng Zong, Yuzhen Chen, Anran Li, Bohao Zhang, Ram Vasudevan arXiv, 2025 arXiv / project website This paper presents Differentiable discrete branched Elastic rods for modeling Furcated DLOs in real-Time (DEFT), a novel framework that combines a differentiable physics-based model with a learning framework to: 1) accurately model branched deformable linear objects (BDLOs) dynamics, including dynamic propagation at junction points and grasping in the middle of a BDLO, 2) achieve efficient computation for real-time inference, and 3) enable planning to demonstrate dexterous BDLO manipulation. |
|
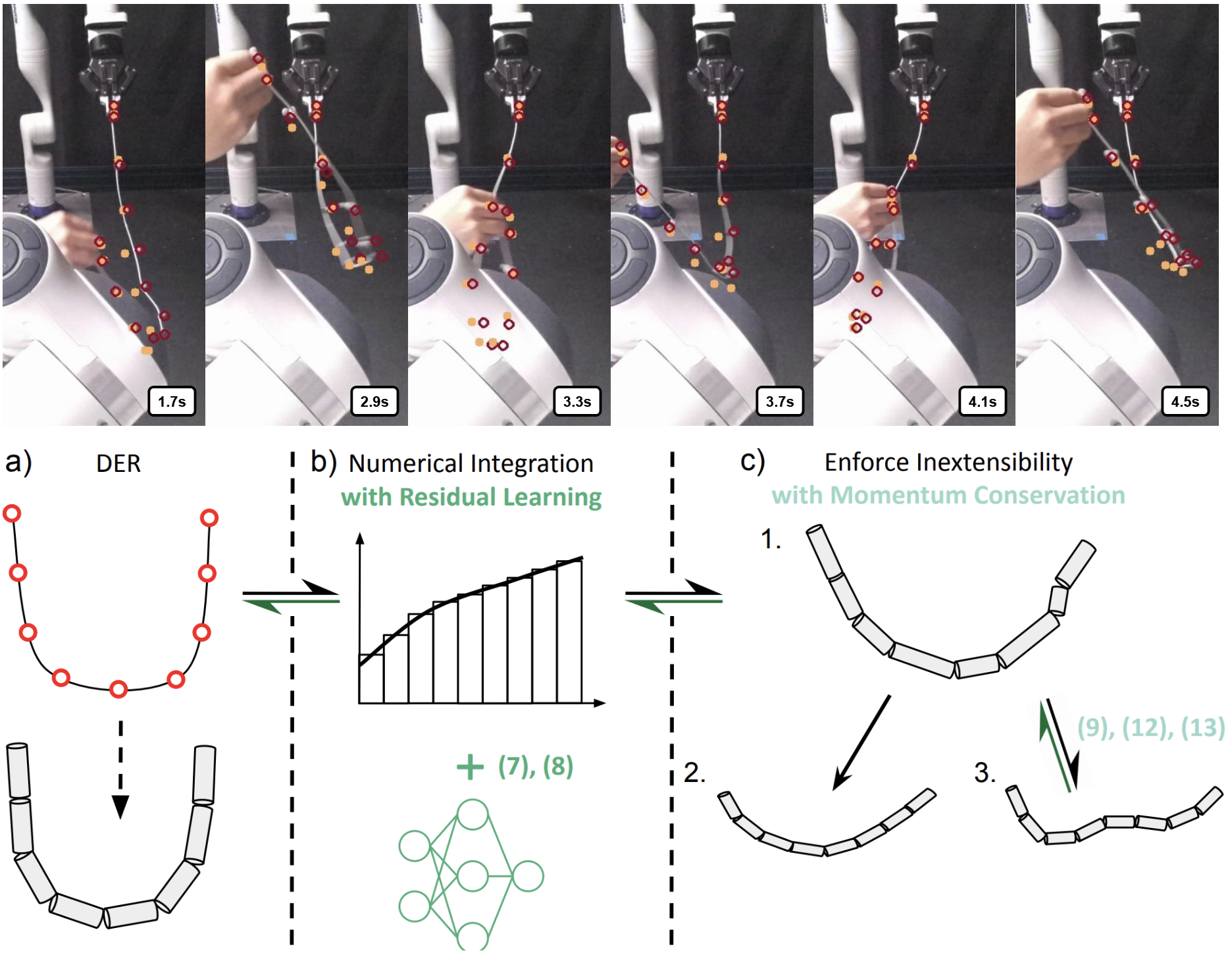
Differentiable Discrete Elastic Rods for Real-Time Modeling of Deformable Linear Objects
Yizhou Chen, Yiting Zhang, Zachary Brei, Tiancheng Zhang, Yuzhen Chen, Julie Wu, Ram Vasudevan CoRL, 2024 arXiv / project website This paper proposes differentiable Discrete Elastic Rods For deformable linear Objects with Real-time Modeling (DEFORM), a novel framework that combines a differentiable physics-based model with a learning framework to model deformable linear objects (DLOs) accurately and in real-time. To further demonstrate the utility of DEFORM, this paper integrates it into a perception pipeline and illustrates its superior performance when compared to the state-of-the-art methods while tracking a DLO even in the presence of occlusions. |
|
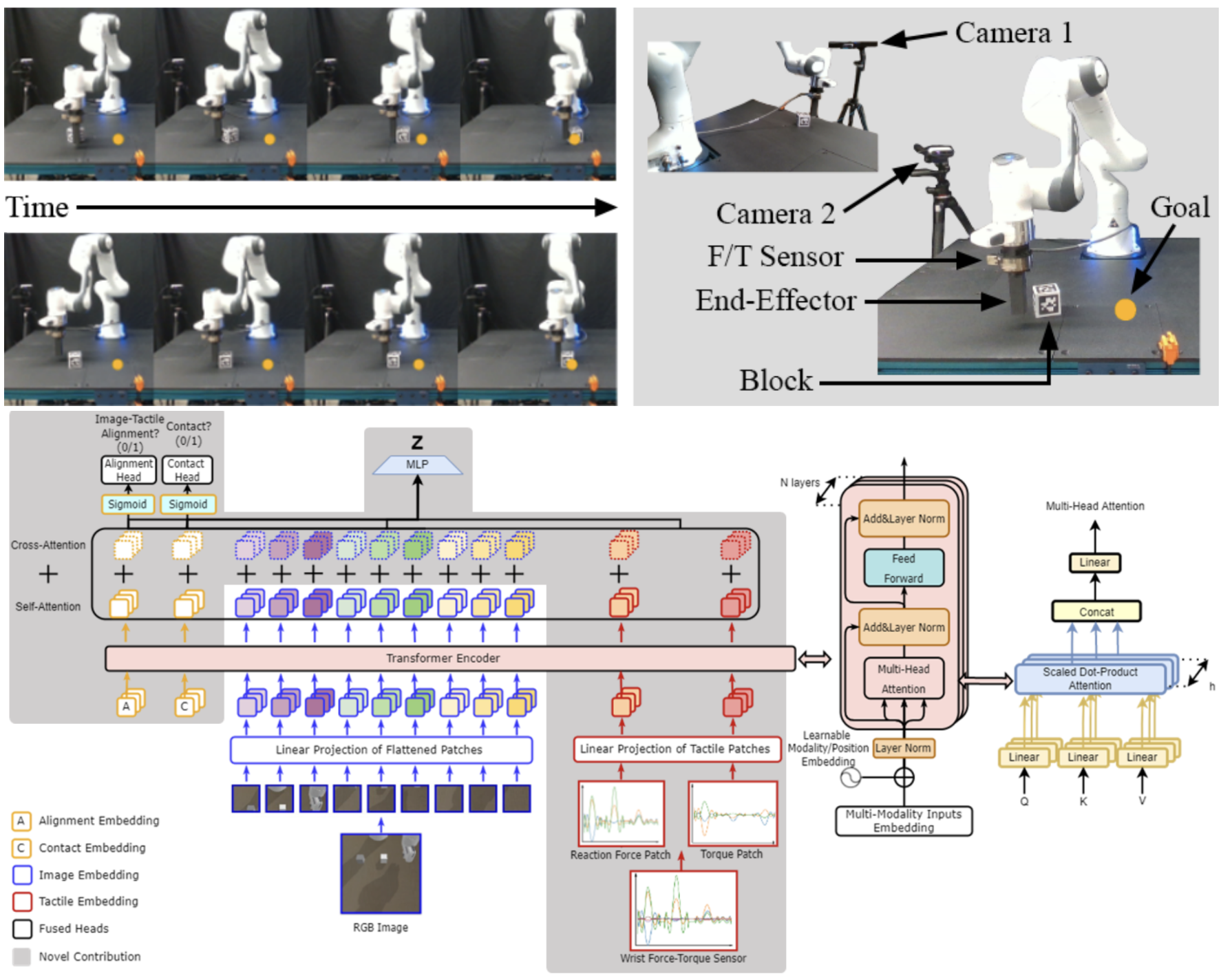
Visuo-Tactile Transformers for Manipulation
Yizhou Chen, Andrea Sipos, Mark Van der Merwe, Nima Fazeli CoRL, 2022 arXiv / project website This paper presents Visuo-Tactile Transformers (VTTs), a novel multimodal representation learning approach suited for model-based reinforcement learning and planning. Our approach extends the Visual Transformer to handle visuo-tactile feedback. Specifically, VTT uses tactile feedback together with self and cross-modal attention to build latent heatmap representations that focus attention on important task features in the visual domain. |